Types of Wheeled robots
Wheeled Robots can use any number of wheels to navigate, with a minimum of one to maximum of … hmmm… whatever the number you choose. We will start our discussion with robots with a single wheel and then go up higher in the number of wheels that can be added.
Single wheel robot: These robots are highly unstable and require extreme engineering and design techniques. Murata girl (Seiko) is one such Unibot which uses only a single wheel to balance and navigate.

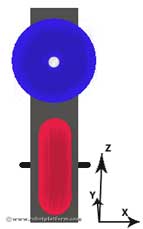
The best way to build a single wheeled robot is to add two wheels, one above the other such that each wheel is perpendicular to the other. If the wheel on the ground stabilizes the robot on y and z plane, the wheel on the top balances in the z and x plane. Although the concept sounds simple, the implementation is quite unfriendly.
Two wheeled robots might sound simpler than one wheeled robot but are still harder to balance and keep them upright. Usually, the center of gravity (average location of weight of object) of these robots is kept below the wheel axle and the wheels are attached parallel to each other. The battery is placed below the body of the robot to keep the center of gravity low.
(average location of weight of object) of these robots is kept below the wheel axle and the wheels are attached parallel to each other. The battery is placed below the body of the robot to keep the center of gravity low.
The image shows a beautifully designed two wheeled nbot, which uses tilt sensors and encoders for balancing and control. The logic used is to drive those wheels in a direction such that the upper part of the robot is falling, and then control the wheels in such a way as to stay under the robot’s center of gravity which makes the robot balanced.
Three wheeled robots are easier to build compared to the previous two. These robots do not require any specialized balancing algorithms and the reason are the most favorable choice for a beginner. They can either be differentially steered or can use a tricycle approach. The wheels are normally arranged in a triangular manner and are hence balanced (Just like a plane requires three connecting points, a robot requires at least three ground contact points to make it balanced).

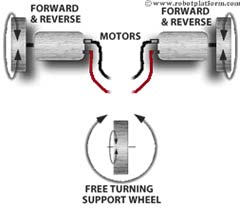
The image shows NASA’s robot using axel rover system which is practically a two wheel robot with a supporting wheel.
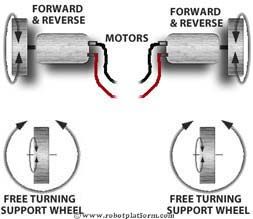
Second image shows the design considerations for a three wheeled robot. The front wheel acts as steering wheel, or most of the time just a balancing wheel while the rear wheels drive the robot. If you ever want to drive and steer all three wheels, consider using Omni wheels.
Four wheeled robots: The best in the list. Four wheels are more efficient compared to three or two wheels. The first two of the four wheels can be used to steer and the next two to drive the robot. Balancing a four wheeled robot is never an issue. Most everyday cars we use are four wheeled and the example is enough to prove its existence and capabilities.
Although the four wheels can be combined and driven in different ways, two of the most common driving and steering methods used for robots with four wheels are Ackerman steering and differential drive.
The main disadvantage compared to a three wheeled robot is the extra cost of the fourth wheel and in few cases an extra motor to drive them, but their advantages surpass the disadvantages.
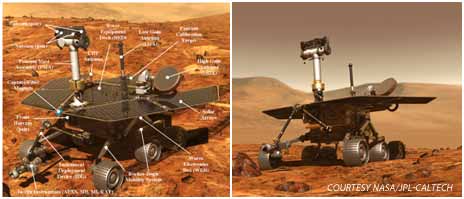
Image shows NASA’s rover – Scarab which uses four wheels for navigation. The second image shows how four wheel robots are generally designed. The front two wheels acts as steering wheels while the rear two are the driving wheels.

5 or more wheels: When you are happy with four wheels, why do you need a fifth wheel, or anything more than four wheels? Not really required when it adds additional cost for wheels, motors, additional power, additional computation and complex design. But if these disadvantages do not actually matter in your complex design, then you can go for it; 5 wheels, 6 wheels, 10 wheels, 20 wheels…,
The below images are an artist’s concept of NASA’s mars rover which uses 6 wheels.
It is you to choose the number of wheels based on the requirement and the type of robot you are building. The minimum number of wheels for a stable robot is three. More than that is a choice which requires additional design considerations and increased cost.
Do you have anything to say?
Visit the Forum to discuss, learn and share anything related to robotics and electronics !!







