Tracked Robots
Tracks, also known as threads are best suited for robots in rough and uneven terrain as tracks provide greater traction and reduce slippage. Combat military tanks, for example are expected to run on rough and uneven terrain and hence they prefer using tracks over wheels.

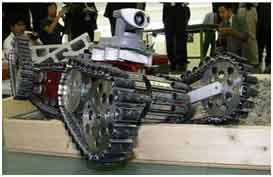
Image shows a planetary rover using tracks (Image Courtesy University of Arizona), and Hibiscus (developed by Chiba Institute of Technology)
Wheels offer many advantages, but at the same time offer a few disadvantages. The first and the foremost is its inability to traverse in rough, uneven and loose terrain. Secondly, wheels can roll over obstacles which are smaller than its wheel diameter, but cannot rollover larger obstacles. Tracks can easily cross over larger obstacles due to their greater area of ground contact. Wheels are designed to work on specific environment, but tracks can be used on almost any terrain. Last and the most favorable reason is that they look “cool” with their rugged look gaining a lot of attention.
Tracked robots primarily use Skid steer drive which is a modified concept of differential drive. A tracked robot has two tracks attached at either side of the chassis driven by two separate motors. They are steered by moving those tracks at different speeds in the same/opposite direction. Most of the time these tracked robots skid to change their direction. This makes the threads/tracks to wear off quickly and also they require larger area to turn as they slide their entire body against the ground.
Do you have anything to say?
Visit the Forum to discuss, learn and share anything related to robotics and electronics !!







