Types of Robot Actuators
In the last part of actuator tutorial, we discussed about pneumatic, hydraulic, piezoelectric and ultrasonic piezoelectric actuators. We will continue the discussion on different types of robot actuators and understand SMA's, combustion engine, and lastly, the very favorite electrical actuators (motors and solenoids).
Shape Memory Alloy (SMA)
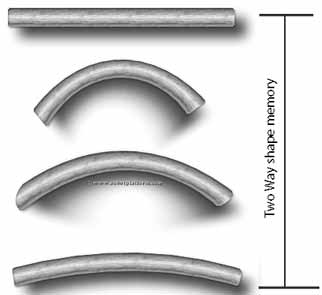
What if a material had memory and reverted to its previous shape on certain circumstances? Shape memory alloys are there for the very reason which remembers its shape before deformation. Basically these alloys can be deformed in cold temperature and when heated, they return to their previous shape. SMA can exhibit either one-way memory effect, or two-way memory effect.
In one way, SMA can be bent and deformed in cold temperature and holds its shape until heated. Once heated, it returns to its original state. Now lowering the temperature again does not have any effect on its shape. 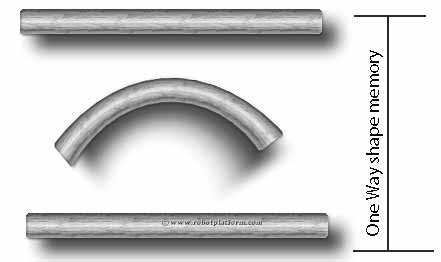
In two-way memory effect, the alloy remembers two shapes. This means when the alloy is cold, it returns to one shape and when heated it goes to another shape. This interesting character of SMA emulates the operation of muscles and can be implemented in robots.
Muscle wire: Also commonly called Nitinol are a type of SMA’s (Shape memory alloy). When these wires are electrically powered, they reduce their length. Muscle wire is an ideal choice for making simple and small walking robots due to their small size, low weight, long life and precise control. However for advanced and heavy weight robots, they tend to be more of a challenge.
Combustion Engine
For large robots and flying robots, combustion engines are generally preferred due to their massive power output. Combustion engines are generally powered by gasoline (fossil fuels where gasoline and air (as an oxidizer) is forced and compressed into a cylinder. At an optimum point, a spark plug creates an electrical spark which ignites the mixture resulting in generation of heat and pressurized gases. The reaction pushes back a piston which can be mechanically connected to other components, creating linear or rotational motion.
Combustion engines can burn fuel internally or externally and respectively known as internal combustion engine and external combustion engine. For hobby robots, only internal combustion engines are preferred.
Electric actuator
As the name says, these actuators use electric current to create motion. The most common implementation is by using wire windings. When current flows through a wire winding, it generates a magnetic field across its poles. Attraction forces between ferrous based objects and magnetized object induces motion.
Similar to other actuators we saw before, electric actuators can create linear motion or rotary motion. Solenoids, for example generate linear motion and electric motors generate rotary motion.
Solenoid
In simple terms, Solenoid is made up of a coil and a movable ferrous core which converts electrical energy into mechanical energy creating linear motion. When electricity flows through a coil, it creates a magnetic field and pulls the ferrous (Iron or steel) piston towards it. Multiple coils or springs can be used to move the piston back to its original position. Solenoids are easy to implement in robots to create a short and quick motion.
Despite the fact that these actuators are generally used for creating linear motion, the mechanical construction can induce rotary motion too.
Electric Motors
These are the most common and the most important actuators available for us, the robot enthusiasts. Similar to other actuators, the purpose of a motor is to convert energy (here, it is electrical energy) into mechanical energy.
Electric motors are one of the finest inventions till date and a boon to robot builders. Since there are so many different kinds of motors available and many different applications, in the next section, we will spend some time understanding their basics and how they work.
Do you have anything to say?
Visit the Forum to discuss, learn and share anything related to robotics and electronics !!







