Types of Robot Sensors
There are different sensors to choose from and we will identify the characteristics of few sensors, and also understand why and where they are used.
Light sensors
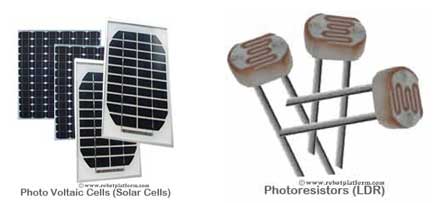
A Light sensor is used to detect light and create a voltage difference. The two main light sensors generally used in robots are Photoresistor and Photovoltaic cells. Other kinds of light sensors like Phototubes, Phototransistors, CCD’s etc. are rarely used.
Photoresistor is a type of resistor whose resistance varies with change in light intensity; more light leads to less resistance and less light leads to more resistance. These inexpensive sensors can be easily implemented in most light dependant robots.
Photovoltaic cells convert solar radiation into electrical energy. This is especially helpful if you are planning to build a solar robot. Although photovoltaic cell is considered as an energy source, an intelligent implementation combined with transistors and capacitors can convert this into a sensor.
Sound Sensor
As the name suggests, this sensor (generally a microphone) detects sound and returns a voltage proportional to the sound level.  A simple robot can be designed to navigate based on the sound it receives. Imagine a robot which turns right for one clap and turns left for two claps. Complex robots can use the same microphone for speech and voice recognition.
A simple robot can be designed to navigate based on the sound it receives. Imagine a robot which turns right for one clap and turns left for two claps. Complex robots can use the same microphone for speech and voice recognition.
Implementing sound sensors is not as easy as light sensors because Sound sensors generate a very small voltage difference which should be amplified to generate measurable voltage change.
Temperature Sensor

What if your robot has to work in a desert and transmit ambient temperature? Simple solution is to use a temperature sensor. Tiny temperature sensor ICs provide voltage difference for a change in temperature. Few generally used temperature sensor IC’s are LM34, LM35, TMP35, TMP36, and TMP37.
Contact Sensor
Contact sensors are those which require physical contact against other objects to trigger. A push button switch, limit switch or tactile bumper switch are all examples of contact sensors.  These sensors are mostly used for obstacle avoidance robots. When these switches hit an obstacle, it triggers the robot to do a task, which can be reversing, turning, switching on a LED, Stopping etc. There are also capacitive contact sensors which react only to human touch (Not sure if they react to animals touch). Touch screen Smart phones available these days use capacitive touch sensors (Not to be confused with older stylus based models). Contact Sensors can be easily implemented, but the drawback is that they require physical contact. In other words, your robot will not turn until it hits an object. A better alternative is to use a proximity sensor.
These sensors are mostly used for obstacle avoidance robots. When these switches hit an obstacle, it triggers the robot to do a task, which can be reversing, turning, switching on a LED, Stopping etc. There are also capacitive contact sensors which react only to human touch (Not sure if they react to animals touch). Touch screen Smart phones available these days use capacitive touch sensors (Not to be confused with older stylus based models). Contact Sensors can be easily implemented, but the drawback is that they require physical contact. In other words, your robot will not turn until it hits an object. A better alternative is to use a proximity sensor.
Proximity Sensor
This is a type of sensor which can detect the presence of a nearby object within a given distance, without any physical contact. The working principle of a Proximity sensor is simple. A transmitter transmits an electromagnetic radiation or creates an electrostatic field and a receiver receives and analyzes the return signal for interruptions. There are different types of Proximity sensors and we will discuss only a few of them which are generally used in robots.
- Infrared (IR) Transceivers: An IR LED transmits a beam of IR light and if it finds an obstacle, the light is simply reflected back which is captured by an IR receiver. Few IR transceivers can also be used for distance measurement.
- Ultrasonic Sensor: These sensors generate high frequency sound waves; the received echo suggests an object interruption. Ultrasonic Sensors can also be used for distance measurement.
- Photoresistor: Photoresistor is a light sensor; but, it can still be used as a proximity sensor. When an object comes in close proximity to the sensor, the amount of light changes which in turn changes the resistance of the Photoresistor. This change can be detected and processed.
There are many different kinds of proximity sensors and only a few of them are generally preferred for robots. For example, Capacitive Proximity sensors are available which detects change in capacitance around it. Inductive proximity sensor detects objects and distance through the use of induced magnetic field.
Distance Sensor
Most proximity sensors can also be used as distance sensors, or commonly known as Range Sensors; IR transceivers and Ultrasonic Sensors are best suited for distance measurement
- Ultrasonic Distance Sensors: The sensor emits an ultrasonic pulse and is captured by a receiver. Since the speed of sound is almost constant in air, which is 344m/s, the time between send and receive is calculated to give the distance between your robot and the obstacle. Ultrasonic distance sensors are especially useful for underwater robots.
- Infrared Distance sensor: IR circuits are designed on triangulation principle for distance measurement. A transmitter sends a pulse of IR signals which is detected by the receiver if there is an obstacle and based on the angle the signal is received, distance is calculated. SHARP has a family of IR transceivers which are very useful for distance measurement. A simple transmit and receive using a couple of transmitters and receivers will still do the job of distance measurement, but if you require precision, then prefer the triangulation method
- Laser range Sensor: Laser light is transmitted and the reflected light is captured and analyzed. Distance is measured by calculating the speed of light and time taken for the light to reflect back to the receiver. These sensors are very useful for longer distances.
- Encoders: These sensors (not actually sensors, but a combination of different components) convert angular position of a shaft or wheel into an analog or digital code. The most popular encoder is an optical encoder which includes a rotational disk, light source and a light detector (generally an IR transmitter and IR receiver). The rotational disk has transparent and opaque pattern (or just black and white pattern) painted or printed over it. When the disk rotates along with the wheel the emitted light is interrupted generating a signal output. The number of times the interruption happens and the diameter of the wheel can together give the distance travelled by the robot.
- Stereo Camera: Two cameras placed adjacent to each other can provide depth information using its stereo vision. Processing the data received from a camera is difficult for a robot with minimal processing power and memory. If opted for, they make a valuable addition to your robot.
There are other stretch and bend sensors which are also capable of measuring distance. But, their range is so limited that they are almost useless for mobile robots.
Pressure Sensors
As the name suggests, pressure sensor measures pressure. Tactile pressure sensors are useful in robotics as they are sensitive to touch, force and pressure. If you design a robot hand and need to measure the amount of grip and pressure required to hold an object, then this is what you would want to use.
Tilt Sensors
Tilt sensors measure tilt of an object. In a typical analog tilt sensor, a small amount of mercury is suspended in a glass bulb. When mercury flows towards one end, it closes a switch which suggests a tilt.
Navigation / Positioning Sensors
The name says it all. Positioning sensors are used to approximate the position of a robot, some for indoor positioning and few others for outdoor positioning.
- GPS (Global Positioning System): The most commonly used positioning sensor is a GPS. Satellites orbiting our earth transmit signals and a receiver on a robot acquires these signals and processes it. The processed information can be used to determine the approximate position and velocity of a robot. These GPS systems are extremely helpful for outdoor robots, but fail indoors. They are also bit expensive at the moment and if their prices fall, very soon you would see most robots with a GPS module attached.
- Digital Magnetic Compass: Similar to a handheld magnetic compass, Digital Magnetic compass provides directional measurements using the earth’s magnetic field which guides your robot in the right direction to reach its destination. These sensors are cheap compared to GPS modules, but a compass works best along with a GPS module if you require both positional feedback and navigation. Philips KMZ51 is sensitive enough to detect earth’s magnetic field.
- Localization: Localization refers to the task of automatically determining the location of a robot in complex environment. Localization is based on external elements called landmarks which can be either artificially placed landmarks, or natural landmark. In the first approach, artificial landmarks or beacons are placed around the robot, and a robot’s sensor captures these signals to determine its exact location. Natural landmarks can be doors, windows, walls, etc. which are sensed by a robots sensor / vision system (Camera). Localization can be achieved using beacons which generate Wi-Fi, Bluetooth, Ultrasound, Infrared, Radio transmissions, Visible Light, or any similar signal.
Acceleration Sensor
An accelerometer is a device which measures acceleration and tilt. There are two kinds of forces which can affect an accelerometer: Static force and Dynamic Force
- Static Force: Static force is the frictional force between any two objects. For example earth’s gravitational force is static which pulls an object towards it. Measuring this gravitational force can tell you how much your robot is tilting. This measurement is exceptionally useful in a balancing robot, or to tell you if your robot is driving uphill or on a flat surface.
- Dynamic force: Dynamic force is the amount of acceleration required to move an object. Measuring this dynamic force using an accelerometer tells you the velocity/speed at which your robot is moving. We can also measure vibration of a robot using an accelerometer, if in any case you need to.
Accelerometer comes in different flavors. Always select the one which is most appropriate for your robot. Some of the factors which you need to consider before selecting an accelerometer are:
- Output Type: Analog or Digital
- Number of Axis: 1,2 or 3
- Accelerometer Swing: ±1.5g, ±2g, ±4g, ±8g, ±16g
- Sensitivity: Higher or Lower (Higher the better)
- Bandwidth
Gyroscope
A gyroscope or simply Gyro is a device which measures and helps maintain orientation using the principle of angular momentum. In other words, a Gyro is used to measure the rate of rotation around a particular axis. Gyroscope is especially useful when you want your robot to not depend on earth’s gravity for maintaining Orientation. (Unlike accelerometer)
IMU
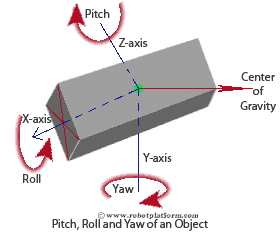
Inertial Measurement Units combine properties of two or more sensors such as Accelerometer, Gyro, Magnetometer, etc, to measure orientation, velocity and gravitational forces. In simple words, IMU’s are capable of providing feedback by detecting changes in an objects orientation (pitch, roll and yaw), velocity and gravitational forces. Few IMUs go a step further and combine a GPS device providing positional feedback.
Voltage Sensors
Voltage sensors typically convert lower voltages to higher voltages, or vice versa. One example is a general Operational-Amplifier (Op-Amp) which accepts a low voltage, amplifies it, and generates a higher voltage output. Few voltage sensors are used to find the potential difference between two ends (Voltage Comparator). Even a simple LED can act as a voltage sensor which can detect a voltage difference and light up. (not considering current requirements here)
Current Sensors
Current sensors are electronic circuits which monitor the current flow in a circuit and output either a proportional voltage or a current. Most current sensors output an analog voltage between 0V to 5V which can be processed further using a microcontroller.
Other sensors for robots
There are hundreds of sensors made today to sense virtually anything you can think of, and it is almost impossible to list all available sensors. Apart from those mentioned above, there are many other sensors used for specific applications. For example: Humidity Sensors measures Humidity; Gas sensors are designed to detect particular gases (helpful for robots which detects gas leaks); Potentiometers are so versatile that they can be used in numerous different applications; Magnetic Field Sensors detect the strength of magnetic field around it.
Conclusion
A simple obstacle avoider robot can be built using a couple of photoresistors, or an infrared sensor. The more complex your robot gets, the more number of sensors you tend to use. A single task may require a combination of different sensors, or different tasks can be achieved using a single sensor. Sometimes, a task can be performed from any of the many available sensors. Decide the best sensor based on availability, cost and ease of use.
Do you have anything to say?
Visit the Forum to discuss, learn and share anything related to robotics and electronics !!







